사람처럼 걷는 로봇, 그런데 모터가 없다고요?
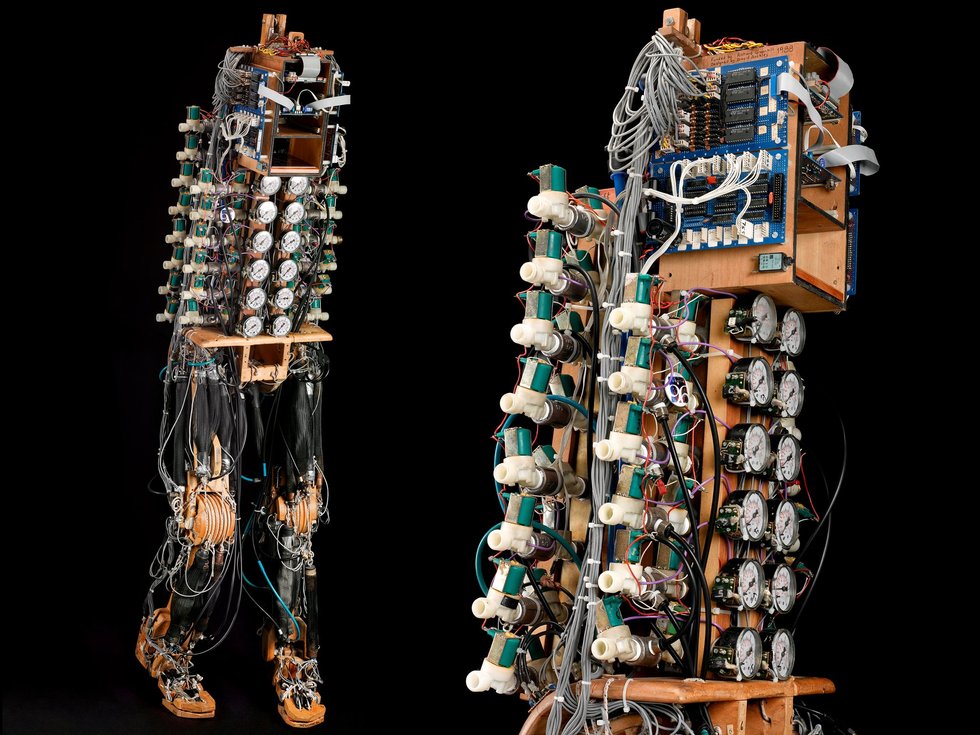
요즘 휴머노이드(인간형) 로봇 하면 보스턴 다이내믹스나 테슬라 옵티머스처럼 정교한 전기 모터가 관절마다 박힌 모습이 떠오르잖아요. 그런데 이번에 소개할 Shadow Walker라는 이족보행 로봇은 좀 달라요. 한 개발자가 개인적으로 만든 DIY 로봇인데, 관절을 움직이는 데 모터를 거의 안 쓰고 대신 공기 근육(air muscle)이라는 걸 썼거든요. 사람의 근육이 움직이는 방식을 흉내 낸 거예요.
이게 왜 흥미롭냐면, 로봇 업계의 주류는 한참 전부터 전기 모터 쪽으로 굳어졌거든요. 그래서 모터를 버리고 공기로 가는 시도는 일종의 '거꾸로 가기'처럼 보이는데, 거기에 의외로 깊은 이유가 있어요.
공기 근육이 뭐냐면
정식 명칭은 맥키번 인공근육(McKibben actuator)이에요. 구조가 생각보다 단순한데요, 고무 같은 신축성 있는 튜브를 그물망으로 감싼 형태예요. 여기에 공기를 불어넣으면 튜브가 부풀면서 옆으로 빵빵해지는데, 그러면 그물망 구조 때문에 길이는 오히려 짧아져요. 즉 공기를 넣으면 수축하면서 잡아당기는 힘이 생기는 거예요. 우리 팔의 이두근이 수축하면서 팔을 굽히는 것과 똑같은 원리죠.
이런 방식의 가장 큰 장점은 부드러움이에요. 전기 모터는 기본적으로 딱딱하고, 충격이 오면 그대로 기어와 관절에 전해지거든요. 반면 공기 근육은 공기 자체가 쿠션 역할을 해서 충격을 흡수해요. 그래서 넘어지거나 부딪혀도 덜 망가지고, 사람 옆에서 움직여도 상대적으로 안전해요. 무게 대비 힘도 꽤 세고요. 이런 성질을 로봇 공학에서는 '유연 구동(compliant actuation)'이라고 불러요. 사람이나 동물처럼 말랑하게 힘을 주고받는 방식이에요.
대신 만만치 않은 단점도 있어요
공기 근육이 좋기만 하면 진작 주류가 됐겠죠. 가장 큰 문제는 정밀 제어가 어렵다는 거예요. 공기는 누르면 압축되는 성질이 있어서(이걸 압축성이라고 해요), 모터처럼 "정확히 30도만 움직여" 하고 똑 떨어지게 제어하기가 까다롭거든요. 또 공기를 계속 공급하려면 컴프레서(공기 압축기)나 압력 탱크가 필요해서 시스템이 무겁고 시끄러워지기도 해요. 근육이 한 방향으로만 당길 수 있어서, 굽혔다 폈다 하려면 보통 두 개를 짝으로 달아야 하는 것도 번거로운 점이에요. 우리 몸에서 이두근과 삼두근이 짝으로 일하는 것처럼요.
Shadow Walker가 의미 있는 건, 이 까다로운 방식을 개인이 직접 설계하고 걷게 만들었다는 점이에요. 대학 연구실이나 대기업이 큰 예산으로 하던 실험을, 개인 메이커가 손으로 구현해 낸 거죠.
업계 흐름에서 보면
사실 공기 근육 연구의 뿌리는 깊어요. 영국의 Shadow Robot Company가 오래전부터 공기근육 기반 로봇 손을 만들어왔고, 일본에서도 재활·간병 로봇 분야에서 부드러운 구동기 연구가 활발하거든요. 최근에는 '소프트 로보틱스(soft robotics)'라고 해서, 딱딱한 금속 대신 말랑한 소재로 로봇을 만드는 흐름이 학계에서 점점 커지고 있어요. 사람과 함께 일하는 협동 로봇, 노약자를 돕는 돌봄 로봇처럼 '안전하게 닿아도 되는' 로봇이 필요해지면서 이런 부드러운 구동 방식이 다시 주목받는 거예요.
한국 개발자·메이커에게
로봇이나 임베디드에 관심 있는 분이라면, 이 프로젝트는 '주류와 다른 길도 충분히 만들 수 있다'는 좋은 사례예요. 꼭 비싼 모터와 정밀 감속기가 있어야만 로봇을 만들 수 있는 게 아니거든요. 공기압 부품은 산업용으로 흔하고 비교적 저렴해서, 메이커 입장에서 실험해볼 여지가 있어요. 제어가 어렵다는 건 거꾸로 보면 PID 제어나 센서 피드백 같은 제어공학을 제대로 공부해볼 좋은 소재이기도 하고요. 당장 상용 제품을 만들 건 아니더라도, '구동 방식이 로봇의 성격을 어떻게 바꾸는가'를 몸으로 이해하는 데 더없이 좋은 주제예요.
정리하면
Shadow Walker는 "모터가 정답이다"라는 통념에 "공기로도 걸을 수 있다"고 답한 DIY 로봇이에요. 정밀함은 양보하더라도 부드러움과 안전을 얻는, 사람을 닮은 접근이죠.
여러분은 앞으로 사람 곁에서 일할 로봇에 딱딱한 모터가 어울린다고 보세요, 아니면 이런 말랑한 구동 방식이 더 맞다고 보세요? 직접 만들어보고 싶은 DIY 로봇 아이디어가 있다면 같이 나눠봐요.
🔗 출처: Hacker News